
 Andrew Belt
7 years ago
Andrew Belt
7 years ago
3 changed files with 129 additions and 9 deletions
Split View
Diff Options
-
+125 -7DSP.md
-
+2 -0README.md
-
+2 -2Toolbar.md
+ 125
- 7
DSP.md
View File
| @@ -1,14 +1,132 @@ | |||
| # DSP | |||
| Digital Signal Processing is the field of mathematics and programming regarding the discretization of continuous signals in time and space. | |||
| Digital signal processing (DSP) is the field of mathematics and programming regarding the discretization of continuous signals in time and space. | |||
| One of its many applications is to generate and process audio from virtual/digital modular synthesizers. | |||
| There are many online resources and books for learning DSP. | |||
| - https://en.wikipedia.org/wiki/Digital_signal_processing | |||
| - https://www.dsprelated.com/ | |||
| - https://dsp.stackexchange.com/ | |||
| - https://ocw.mit.edu/resources/res-6-008-digital-signal-processing-spring-2011/ | |||
| - http://dspguide.com/ | |||
| - [Digital signal processing](https://en.wikipedia.org/wiki/Digital_signal_processing) | |||
| - [DSPRelated.com](https://www.dsprelated.com/) | |||
| - [Signal Processing Stack Exchange](https://dsp.stackexchange.com/) | |||
| - [Digital Signal Processing MIT OpenCourseWare](https://ocw.mit.edu/resources/res-6-008-digital-signal-processing-spring-2011/) | |||
| - [The Scientist and Engineer's Guide to Digital Signal Processing](http://dspguide.com/) by Steven W. Smith | |||
| - [The Art of VA Filter Design](http://www.native-instruments.com/fileadmin/ni_media/downloads/pdf/VAFilterDesign_2.0.0a.pdf) by Vadim Zavalishin (PDF) | |||
| More modular synthesizer-specific content will be added here in the future. | |||
| Below are my mindless ramblings of various topics with a focus on DSP for modular synthesizers. | |||
| Eventually this will become organized, but it is currently a *work-in-progress*. | |||
| If anything here is inaccurate, you can [edit it yourself](https://github.com/VCVRack/manual) or [open an issue](https://github.com/VCVRack/manual/issues) in the manual's source repository. | |||
| Image credits are from Wikipedia. | |||
| ### Sampling | |||
| A *signal* is a function $f(t): \mathbb{R} \rightarrow \mathbb{R}$ of amplitudes (voltages, sound pressure levels, etc.) defined on a time continuum, and a *sequence* is a function $f(n): \mathbb{Z} \rightarrow \mathbb{R}$ defined only at integer points, often written as $f_n$. | |||
| The [Nyquist–Shannon sampling theorem](https://en.wikipedia.org/wiki/Nyquist%E2%80%93Shannon_sampling_theorem) states that a signal with no frequency components higher than half the sample rate $f_{sr}$ can be sampled and reconstructed without losing information. | |||
| In other words, if you bandlimit a signal (with a brickwall lowpass filter at $f_{sr}/2$) and sample points at $f_{sr}$, you can reconstruct the bandlimited signal by finding the unique signal which passes through all points and has no frequency components higher than $f_{sr}/2$. | |||
| In practice, digital-to-analog converters (DACs) apply an approximation of a brickwall lowpass filter to remove frequencies higher than $f_{sr}/2$ from the signal. | |||
| The signal is integrated for a small fraction of the sample time $1/f_{sr}$ to obtain an approximation of the amplitude at a point in time, and this measurement is quantized to the nearest digital value. | |||
| Analog-to-digital converters (ADCs) convert a digital value to an amplitude and hold it for a fraction of the sample time. | |||
| A [reconstruction filter](https://en.wikipedia.org/wiki/Reconstruction_filter) is applied, producing a signal close to the original bandlimited signal. | |||
| High-quality ADCs may include digital upsampling before reconstruction . | |||
| [Dithering](https://en.wikipedia.org/wiki/Dither) may be done but is mostly unnecessary for bit depths higher than 16. | |||
| Of course, noise may also be introduced in each of these steps. | |||
| Fortunately, modern DACs and ADCs as cheap as $2-5 per chip can digitize and reconstruct a signal with a variation beyond human recognizability, with signal-to-noise (SNR) ratios and total harmonic distortion (THD) lower than -90dBr. | |||
| ### Aliasing | |||
| The Nyquist–Shannon sampling theorem requires the original signal to be bandlimited at $f_{sr}/2$ before digitizing. | |||
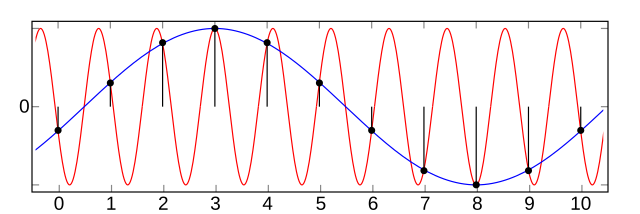
| If it is not, reconstructing will result in an entirely different signal, which usually sounds ugly and is associated with poor-quality DSP. | |||
| Consider the high-frequency sine wave in red. | |||
| If the signal is sampled every integer, its unique reconstruction is the signal in blue, which has completely different harmonic content as the original signal. | |||
| If correctly bandlimited, the original signal would be zero (silence), and thus the reconstruction would be zero. | |||
| [](https://en.wikipedia.org/wiki/File:AliasingSines.svg) | |||
| A square wave has harmonic amplitudes $\frac{1}{k}$ for odd harmonics $k$. | |||
| However, after bandlimiting, all harmonics above $f_{sr}/2$ become zero, so its reconstruction should look like this. | |||
| [](https://en.wikipedia.org/wiki/File:AliasingSines.svg) | |||
| The curve produced by a bandlimited discontinuity is known as the [Gibbs phenomenon](https://en.wikipedia.org/wiki/Gibbs_phenomenon). | |||
| A DSP algorithm attempting to model a jump found in sawtooth or square waves must include this effect, such as by inserting a minBLEP or polyBLEP signal for each discontinuity. | |||
| Otherwise higher harmonics, like the high-frequency sine wave above, will pollute the spectrum below $f_{sr}/2$. | |||
| Even signals containing no discontinuities, such as a triangle wave with harmonic amplitudes $(-1)^k / k^2$, must be correctly bandlimited or aliasing will occur. | |||
| One possible method is to realize that a triangle wave is an integrated square wave, and an integrator is just a filter with a -20dB per [decade](https://en.wikipedia.org/wiki/Decade_(log_scale)) slope. | |||
| Since linear filters commute, a bandlimited integrated square wave is just an integrated bandlimited square wave. | |||
| The most general approach is to generate samples at a high sample rate, apply a FIR or polyphase filter, and downsample by an integer factor (known as decimation). | |||
| For more specific applications, more advances techniques exist for certain cases. | |||
| Aliasing is required for many processes, including waveform generation, waveshaping, distortion, saturation, and typically all nonlinear processes. | |||
| It is sometimes *not* required for reverb, linear filters, audio-rate FM of sine signals (which is why primitive digital chips in the 80's were able to sound reasonably good), mixing signals, and most other linear processes. | |||
| ### Linear filters | |||
| A linear filter is a operation that applies gain depending on a signal's frequency content, defined by | |||
| $$Y(s) = H(s) X(s)$$ | |||
| where $s = i \omega$ is the complex angular frequency, $X$ and $Y$ are the [Laplace transforms](https://en.wikipedia.org/wiki/Laplace_transform) of the input signal $x(t)$ and output signal $y(t)$, and $H(s)$ is the [transfer function](https://en.wikipedia.org/wiki/Transfer_function) of the filter, defining its character. | |||
| Note that the [Fourier transform](https://en.wikipedia.org/wiki/Fourier_transform) is not used because of time causality, i.e. we do not know the future of a signal. | |||
| The filter is "linear" because the filtered sum of two signals is equal to the sum of the two individually filtered signals. | |||
| A log-log plot of $H(i \omega)$ is called a [Bode plot](https://en.wikipedia.org/wiki/Bode_plot). | |||
| [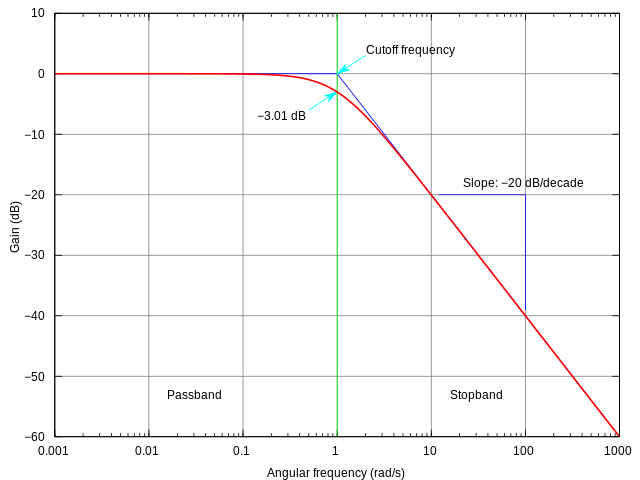](https://en.wikipedia.org/wiki/File:Butterworth_response.svg) | |||
| To be able to exploit various mathematical tools, the transfer function is often written as a rational function in terms of $s^{-1}$ | |||
| $$H(s) = \frac{\sum_{p=0}^P b_p s^{-p}}{\sum_{q=0}^Q a_q s^{-q}}$$ | |||
| where $a_q$ and $b_p$ are called the *analog filter coefficients*. | |||
| With sufficient orders $P$ and $Q$ of the numerator and denominator polynomial, you can approximate most linear analog filters found in synthesis. | |||
| To digitally implement a transfer function, define $z$ as the operator that transforms a sample $x_n$ to its following sample, i.e. $x_{n+1} = z[x_n]$. | |||
| We can actually write this as a variable in terms of $s$ and the sample time $T = 1/f_{sr}$. | |||
| (Consider a sine wave with angular frequency $\omega$. The $z$ operator shifts its phase as if we delayed by $T$ time.) | |||
| $$z = e^{sT}$$ | |||
| A first order approximation of this is | |||
| $$z = \frac{e^{sT/2}}{e^{-sT/2}} \approx \frac{1 + sT/2}{1 - sT/2}$$ | |||
| and its inverse is | |||
| $$s = \frac{1}{T} \ln{z} \approx \frac{2}{T} \frac{1 - z^{-1}}{1 + z^{-1}}$$ | |||
| This is known as the [Bilinear transform](https://en.wikipedia.org/wiki/Bilinear_transform). | |||
| In digital form, the rational transfer function is written as | |||
| $$H(z) = \frac{\sum_{n=0}^N b_n s^{-n}}{\sum_{m=0}^M a_m s^{-m}}$$ | |||
| Note that the orders $N$ and $M$ are not necessarily equal to the orders $P$ and $Q$ of the analog form, and we obtain a new set of numbers $a_m$ and $b_n$ called the *digital filter coefficients*. | |||
| The *zeros* of the filter are the nonzero values of $z$ which give a zero numerator, and the *poles* are the nonzero values of $z$ which give a zero denominator. | |||
| A linear filter is stable (its [impulse response](https://en.wikipedia.org/wiki/Impulse_response) converges to 0) if and only if all poles lie strictly within the complex unit circle, i.e. $|z| < 1$. | |||
| We should now have all the tools we need to digitally implement any linear analog filter response $H(s)$ and vise-versa. | |||
| #### FIR filters | |||
| A finite impulse response (FIR) filter is a digital filter with $M = 0$ (a transfer function denominator of 1). For an input $x_k$ and output $y_k$, | |||
| $$y_k = \sum_{n=0}^N b_n x_{k-n}$$ | |||
| They are computationally straightforward and always stable since they have no poles. | |||
| Long FIR filters ($N \geq 128$) like FIR reverbs (yes, they are just linear filters) can be optimized through FFTs. | |||
| Note that the above formula is the convolution between vectors $y$ and $b$, and by the [convolution theorem](https://en.wikipedia.org/wiki/Convolution_theorem), | |||
| $$y \ast b = \mathcal{F}^{-1} \{ \mathcal{F}\{y\} \cdot \mathcal{F}\{b\} \}$$ | |||
| where $\cdot$ is element-wise multiplication. | |||
| While the naive FIR formula above is $O(n^2)$ when processing blocks of $n$ samples, the FFT FIR method is $O(\log n)$. | |||
| A disadvantage of the FFT FIR method is that the signal must be delayed by $N$ samples to produce any output. | |||
| You can combine the naive and FFT methods into a hybrid approach with the [overlap-add](https://en.wikipedia.org/wiki/Overlap%E2%80%93add_method) or [overlap-save](https://en.wikipedia.org/wiki/Overlap%E2%80%93save_method) methods. | |||
| #### IIR filters | |||
| An infinite impulse response (IIR) filter is a general rational transfer function. Applying the $H(z)$ operator to an input and output signal, | |||
| $$\sum_{m=0}^M a_m y_{k-m} = \sum_{n=0}^N b_n x_{k-n}$$ | |||
| Usually $a_0$ is normalized to 1, and $y_k$ can be written explicitly. | |||
| $$y_k = \sum_{n=0}^N b_n x_{k-n} - \sum_{m=1} a_m y_{k-m}$$ | |||
| For $N, M = 2$, this is a [biquad filter](https://en.wikipedia.org/wiki/Digital_biquad_filter), a very fast, numerically stable, and reasonably good sounding filter. | |||
| $$H(z) = \frac{b_0 + b_1 z^{-1} + b_2 z^{-2}}{1 + a_1 z^{-1} + a_2 z^{-2}}$$ | |||
+ 2
- 0
README.md
View File
| @@ -8,6 +8,8 @@ Send a pull request to this repository with your edits. | |||
| Major changes like new pages and complete overhauls are welcome, as well as minor fixes like grammar, spelling, and reorganization. | |||
| Your PR will be accepted if it is a net positive benefit to readers. | |||
| The LaTeX renderer supports [these functions](https://khan.github.io/KaTeX/function-support.html). | |||
| ### Building | |||
| Install [Node](https://nodejs.org/en/). Make sure `npm` is in your PATH. | |||
+ 2
- 2
Toolbar.md
View File
| @@ -5,9 +5,9 @@ | |||
| When power meters are enabled, Rack measures the amount of time spent processing each module in *mS* (millisamples). | |||
| In many ways, this is analogous to the module power limit imposed by hardware modular synthesizers in *mA* (milliamperes). | |||
| The total amount of time spent processing all modules must equal **1000 mS**. | |||
| To maintain a stable audio clock, the total amount of time spent processing all modules must equal **1000 mS**. | |||
| To achieve this, the [Audio](Core.md#audio) module from [Core](Core.md) uses your audio device's high-precision clock to regulate Rack's processing loop, so it idles for some amount of mS until this total is met. | |||
| If the Audio idle time falls to an average of 0 mS over its block size, an audio stutter will occur. | |||
| If the Audio idle time falls close to an average of 0 mS over its block size, an audio stutter may occur. | |||
| This can be caused by other modules consuming lots of mS. | |||
| ### Internal sample rate | |||